Public Member Functions | |
| PathfindingCommand (PathPlannerPath targetPath, PathConstraints constraints, Supplier< Pose2d > poseSupplier, Supplier< ChassisSpeeds > speedsSupplier, Consumer< ChassisSpeeds > outputRobotRelative, PathFollowingController controller, double rotationDelayDistance, ReplanningConfig replanningConfig, BooleanSupplier shouldFlipPath, Subsystem... requirements) | |
| PathfindingCommand (Pose2d targetPose, PathConstraints constraints, double goalEndVel, Supplier< Pose2d > poseSupplier, Supplier< ChassisSpeeds > speedsSupplier, Consumer< ChassisSpeeds > outputRobotRelative, PathFollowingController controller, double rotationDelayDistance, ReplanningConfig replanningConfig, Subsystem... requirements) | |
| void | initialize () |
| void | execute () |
| boolean | isFinished () |
| void | end (boolean interrupted) |
 Public Member Functions inherited from edu.wpi.first.wpilibj2.command.Command Public Member Functions inherited from edu.wpi.first.wpilibj2.command.Command | |
| Set< Subsystem > | getRequirements () |
| final void | addRequirements (Subsystem... requirements) |
| String | getName () |
| void | setName (String name) |
| String | getSubsystem () |
| void | setSubsystem (String subsystem) |
| ParallelRaceGroup | withTimeout (double seconds) |
| ParallelRaceGroup | until (BooleanSupplier condition) |
| ParallelRaceGroup | onlyWhile (BooleanSupplier condition) |
| SequentialCommandGroup | beforeStarting (Runnable toRun, Subsystem... requirements) |
| SequentialCommandGroup | beforeStarting (Command before) |
| SequentialCommandGroup | andThen (Runnable toRun, Subsystem... requirements) |
| SequentialCommandGroup | andThen (Command... next) |
| ParallelDeadlineGroup | deadlineWith (Command... parallel) |
| ParallelCommandGroup | alongWith (Command... parallel) |
| ParallelRaceGroup | raceWith (Command... parallel) |
| RepeatCommand | repeatedly () |
| ProxyCommand | asProxy () |
| ConditionalCommand | unless (BooleanSupplier condition) |
| ConditionalCommand | onlyIf (BooleanSupplier condition) |
| WrapperCommand | ignoringDisable (boolean doesRunWhenDisabled) |
| WrapperCommand | withInterruptBehavior (InterruptionBehavior interruptBehavior) |
| WrapperCommand | finallyDo (BooleanConsumer end) |
| WrapperCommand | finallyDo (Runnable end) |
| WrapperCommand | handleInterrupt (Runnable handler) |
| void | schedule () |
| void | cancel () |
| boolean | isScheduled () |
| boolean | hasRequirement (Subsystem requirement) |
| InterruptionBehavior | getInterruptionBehavior () |
| boolean | runsWhenDisabled () |
| WrapperCommand | withName (String name) |
| void | initSendable (SendableBuilder builder) |
| Public Member Functions inherited from edu.wpi.first.util.sendable.Sendable | |
Additional Inherited Members | |
| Protected Member Functions inherited from edu.wpi.first.wpilibj2.command.Command | |
| Command () | |
| Protected Attributes inherited from edu.wpi.first.wpilibj2.command.Command | |
| Set< Subsystem > | m_requirements = new HashSet<>() |
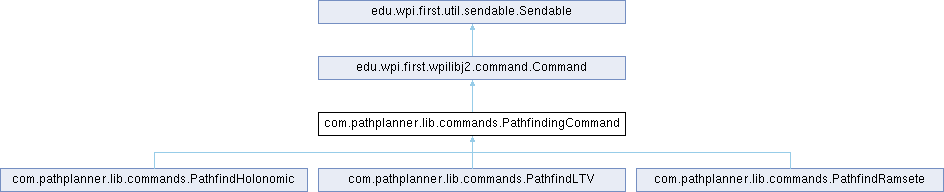
Detailed Description
Base pathfinding command
Constructor & Destructor Documentation
◆ PathfindingCommand() [1/2]
| com.pathplanner.lib.commands.PathfindingCommand.PathfindingCommand | ( | PathPlannerPath | targetPath, |
| PathConstraints | constraints, | ||
| Supplier< Pose2d > | poseSupplier, | ||
| Supplier< ChassisSpeeds > | speedsSupplier, | ||
| Consumer< ChassisSpeeds > | outputRobotRelative, | ||
| PathFollowingController | controller, | ||
| double | rotationDelayDistance, | ||
| ReplanningConfig | replanningConfig, | ||
| BooleanSupplier | shouldFlipPath, | ||
| Subsystem... | requirements ) |
Constructs a new base pathfinding command that will generate a path towards the given path.
- Parameters
-
targetPath the path to pathfind to constraints the path constraints to use while pathfinding poseSupplier a supplier for the robot's current pose speedsSupplier a supplier for the robot's current robot relative speeds outputRobotRelative a consumer for the output speeds (robot relative) controller Path following controller that will be used to follow the path rotationDelayDistance How far the robot should travel before attempting to rotate to the final rotation replanningConfig Path replanning configuration shouldFlipPath Should the target path be flipped to the other side of the field? This will maintain a global blue alliance origin. requirements the subsystems required by this command
◆ PathfindingCommand() [2/2]
| com.pathplanner.lib.commands.PathfindingCommand.PathfindingCommand | ( | Pose2d | targetPose, |
| PathConstraints | constraints, | ||
| double | goalEndVel, | ||
| Supplier< Pose2d > | poseSupplier, | ||
| Supplier< ChassisSpeeds > | speedsSupplier, | ||
| Consumer< ChassisSpeeds > | outputRobotRelative, | ||
| PathFollowingController | controller, | ||
| double | rotationDelayDistance, | ||
| ReplanningConfig | replanningConfig, | ||
| Subsystem... | requirements ) |
Constructs a new base pathfinding command that will generate a path towards the given pose.
- Parameters
-
targetPose the pose to pathfind to, the rotation component is only relevant for holonomic drive trains constraints the path constraints to use while pathfinding goalEndVel The goal end velocity when reaching the target pose poseSupplier a supplier for the robot's current pose speedsSupplier a supplier for the robot's current robot relative speeds outputRobotRelative a consumer for the output speeds (robot relative) controller Path following controller that will be used to follow the path rotationDelayDistance How far the robot should travel before attempting to rotate to the final rotation replanningConfig Path replanning configuration requirements the subsystems required by this command
Member Function Documentation
◆ end()
| void com.pathplanner.lib.commands.PathfindingCommand.end | ( | boolean | interrupted | ) |
The action to take when the command ends. Called when either the command finishes normally, or when it interrupted/canceled.
Do not schedule commands here that share requirements with this command. Use andThen(Command...) instead.
- Parameters
-
interrupted whether the command was interrupted/canceled
Reimplemented from edu.wpi.first.wpilibj2.command.Command.
◆ execute()
| void com.pathplanner.lib.commands.PathfindingCommand.execute | ( | ) |
The main body of a command. Called repeatedly while the command is scheduled.
Reimplemented from edu.wpi.first.wpilibj2.command.Command.
◆ initialize()
| void com.pathplanner.lib.commands.PathfindingCommand.initialize | ( | ) |
The initial subroutine of a command. Called once when the command is initially scheduled.
Reimplemented from edu.wpi.first.wpilibj2.command.Command.
◆ isFinished()
| boolean com.pathplanner.lib.commands.PathfindingCommand.isFinished | ( | ) |
Whether the command has finished. Once a command finishes, the scheduler will call its end() method and un-schedule it.
- Returns
- whether the command has finished.
Reimplemented from edu.wpi.first.wpilibj2.command.Command.
The documentation for this class was generated from the following file:
- D:/SDASVN/2024/RaspberryPi/VSCode/Source/com/pathplanner/lib/commands/PathfindingCommand.java
Generated by